{kind=link}
{kind=link}
Deckcodage : égalité Filles-Garçons en sciences
Un exemple d'usage pédagogique, pour le collège, avec le jeu de cartes Deckcodage.

Académie
de Montpellier
Portail pédagogique académique de l'Académie de Montpellier
Partager pour faire réussir les élèves
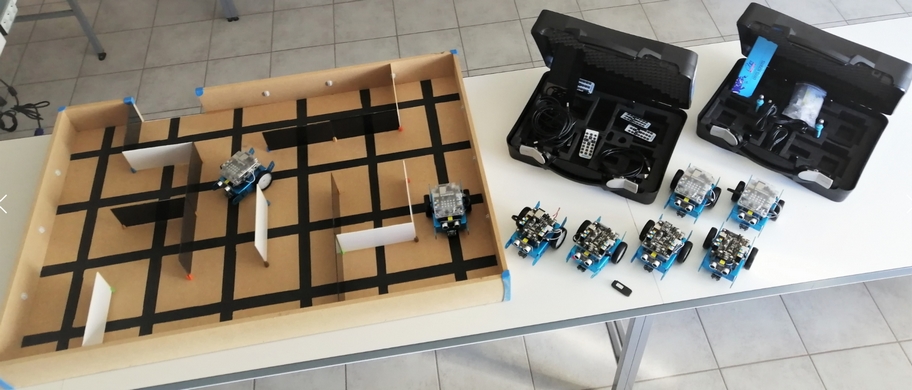
mBot est le robot pédagogique incontournable tant en collège qu'en lycée, il est programmable en "blocs" ou en langage évolué "Python" ( version 2).

Il peut détecter des obstacles, suivre une ligne, émettre des sons et des signaux lumineux, recevoir des ordres d’une télécommande,
communiquer en infrarouge avec un autre robot. Dans sa version 2, il est équipé d'odomètres et par ailleurs programmable en langage Python.
Le LAB dispose de 8 mBots (V1) ainsi que d'un V2 mis à la disposition des établissements de l'académie.
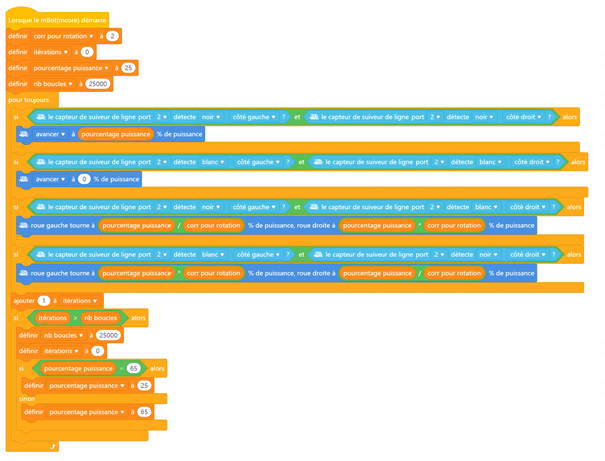
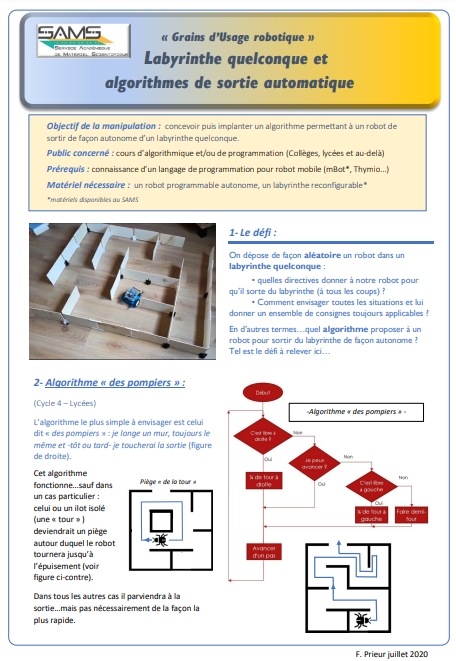
On dépose de façon aléatoire un robot dans un labyrinthe quelconque :
*quelles directives donner à notre robot pour qu'il sorte du labyrinthe de façon autonome?
*comment envisager toutes les situations et lui donner un ensemble de consignes toujours applicables?
En d'autres termes, quel algorithme implanter dans mBot pour lui permettre de sortir du labyrinthe de façon autonome? Tel est le défi à relever ici.
|  |
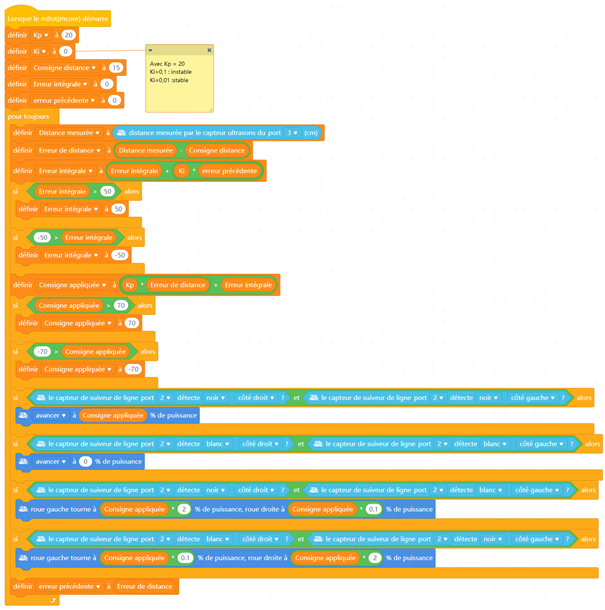
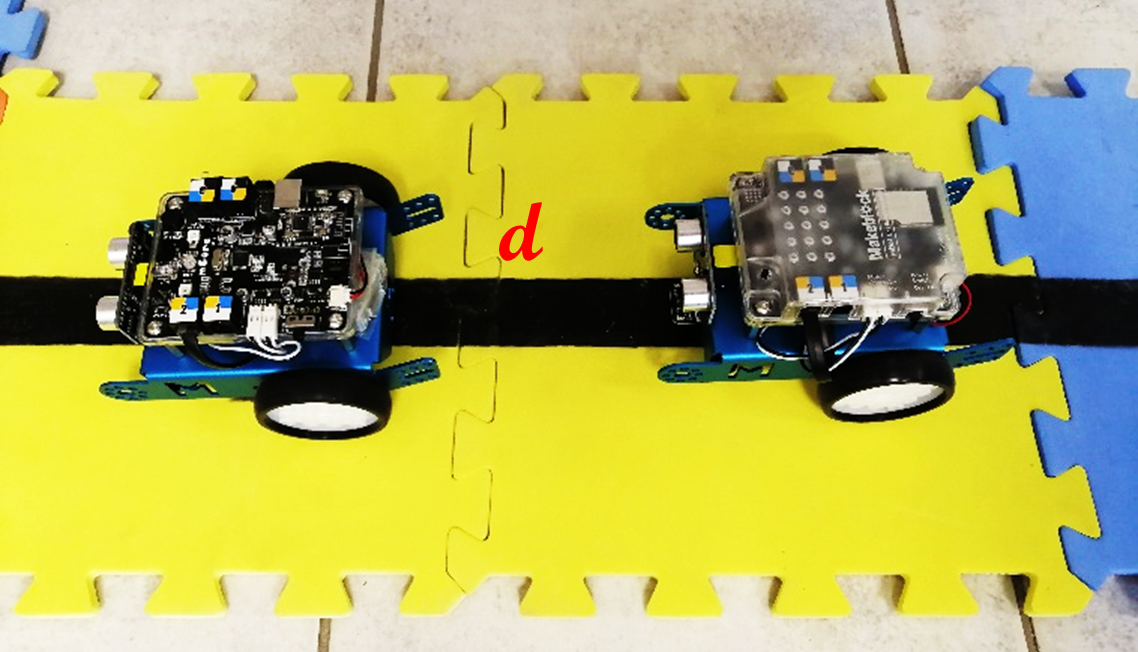
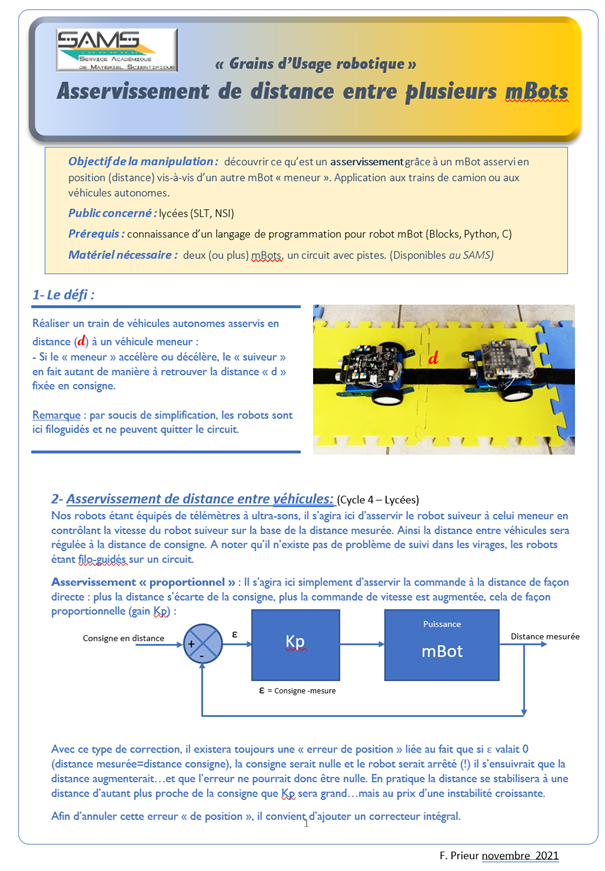
L'objectif de cette manipulation est de découvrir ce qu'est un asservissement grâce à un mBot asservi en position (distance) vis à vis d'un autre mBot "meneur".
*si le meneur accélère ou décélère, le "suiveur" en fait autant de manière à retrouver la distance "d" fixée en consigne.
*on traitera d'abord un asservissement en mode proportionnel (P), dans un second temps en mode proportionnel intégral (PI)
On visualisera ainsi très clairement "l'erreur de position" importante dans le premier cas, nulle dans l'autre ainsi que les potentiels problèmes d'instabilités en jouant sur les paramètres d'asservissement.
 |  |

| 
|